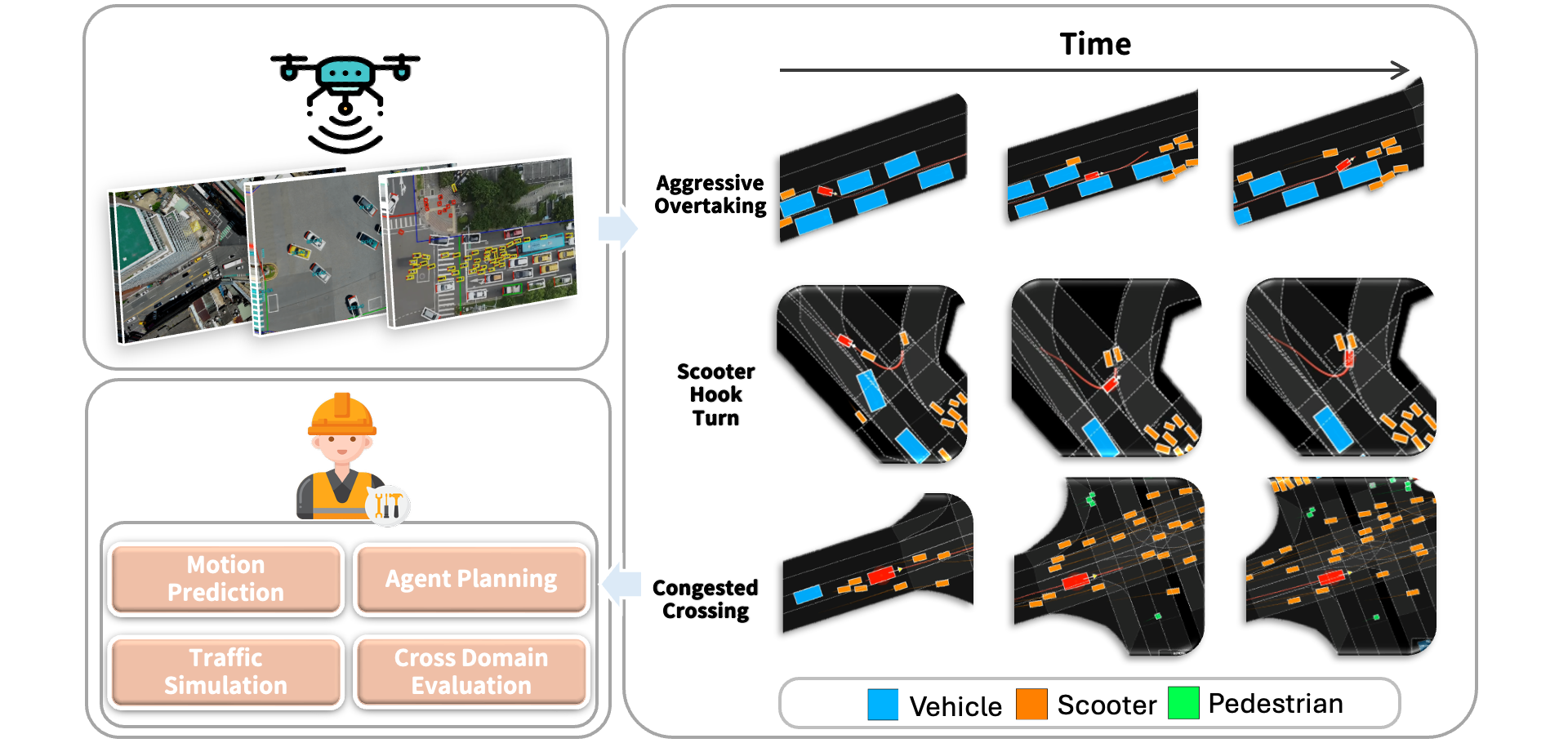
HetroD is a high-fidelity, drone dataset that captures unstructured maneuvers such as hook turns, aggressive overtakes, queue cutting, and congested crossings among vehicle, scooters, and pedestrians in heterogeneous traffic environments. These maneuvers are critical for testing autonomous driving systems yet remain underexplored in the community. To address this, we construct a benchmark to evaluate existing methods in motion planning, motion prediction, traffic simulation, and conduct a thorough investigation of their generalization across datasets.
Abstract
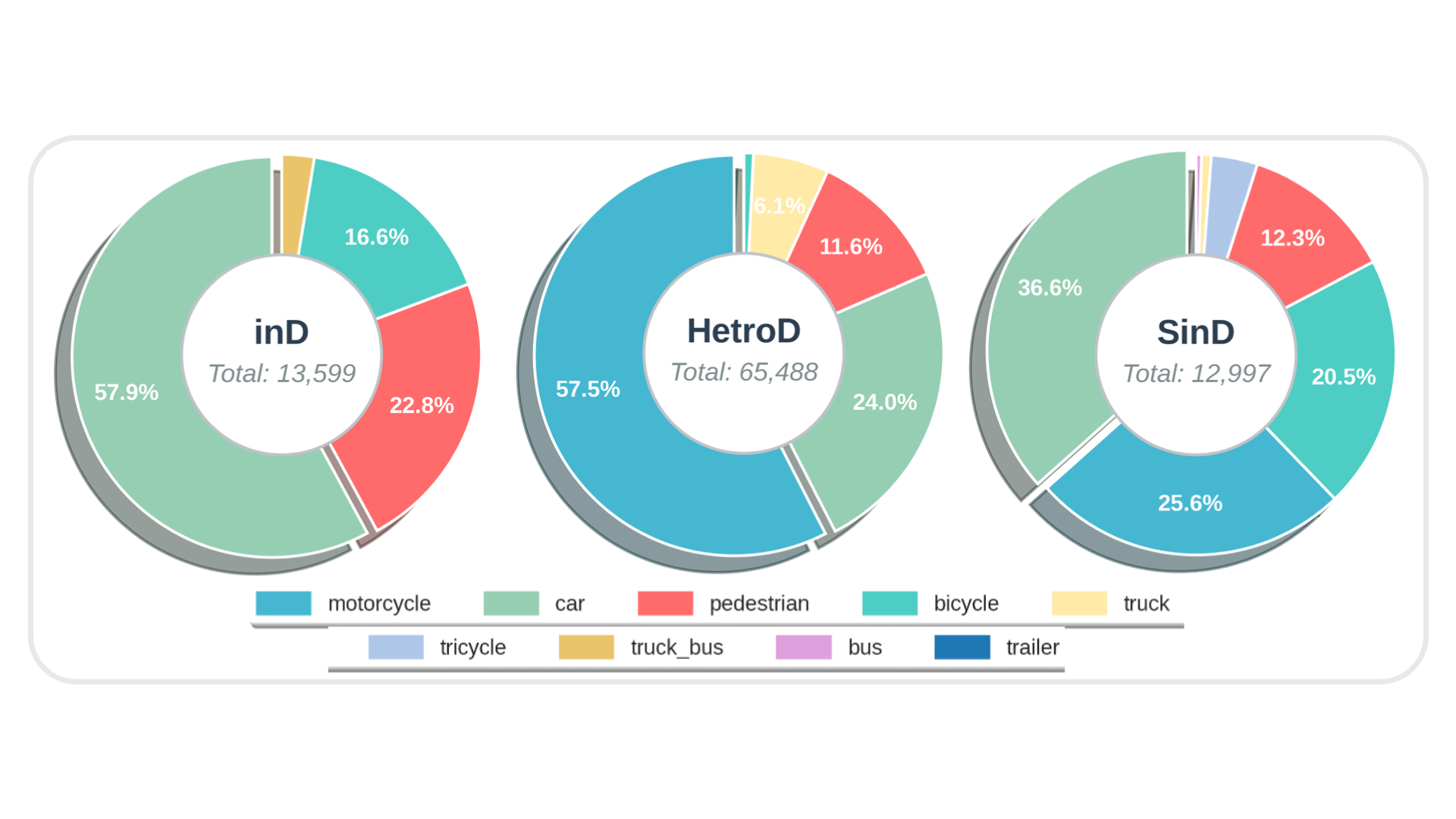
We present HetroD, a dataset and benchmark for developing autonomous driving systems in heterogeneous environments. HetroD targets the critical challenge of navigating real-world heterogeneous traffic dominated by vulnerable road users (VRUs), including pedestrians, cyclists, motorcyclists, and vehicles. These mixed agent types exhibit complex behaviors such as hook turns, lane splitting, and informal right-of-way negotiation. Such behaviors pose significant challenges for autonomous vehicles but remain underrepresented in existing datasets focused on structured, lane-disciplined traffic. To bridge the gap, we collect a large-scale drone-based dataset to provide a holistic observations of traffic scenes with centimeter-accurate annotations, HD maps, and traffic signal states. We further develop a modular toolkit for extracting per-agent scenarios to support downstream task development. In total, the dataset comprises over 65.4k high-fidelity agent trajectories, 70% of which are from VRUs. HetroD supports modeling of VRU behaviors in dense, heterogeneous traffic and provides standardized benchmarks for forecasting, planning, and simulation tasks. Evaluation results reveal that state- of-the-art prediction and planning models struggle with the challenges presented by our dataset: they fail to predict lateral VRU movements, cannot handle unstructured maneuvers, and exhibit limited performance in dense and multi-agent scenarios, highlighting the need for more robust approaches to heterogeneous traffic.